Kalibrace kompasu, IMU jednotky a čidel u profi dronů DJI
Druhou nejdůležitější součástí dronu jsou IMU jednotky, GPS, kompasy a čidla, díky kterým dron ví kde je, jakou má orientaci, výšku, náklon, teplotu a plno dalších údajů, které jsou nezbytné k bezpečnému letu. Je proto potřeba udržovat tato čidla zkalibrovaná a ideálně v co největší vzdálenosti od objektů, které způsobují jejich rušení, proto pro Vás máme několik doporučení.
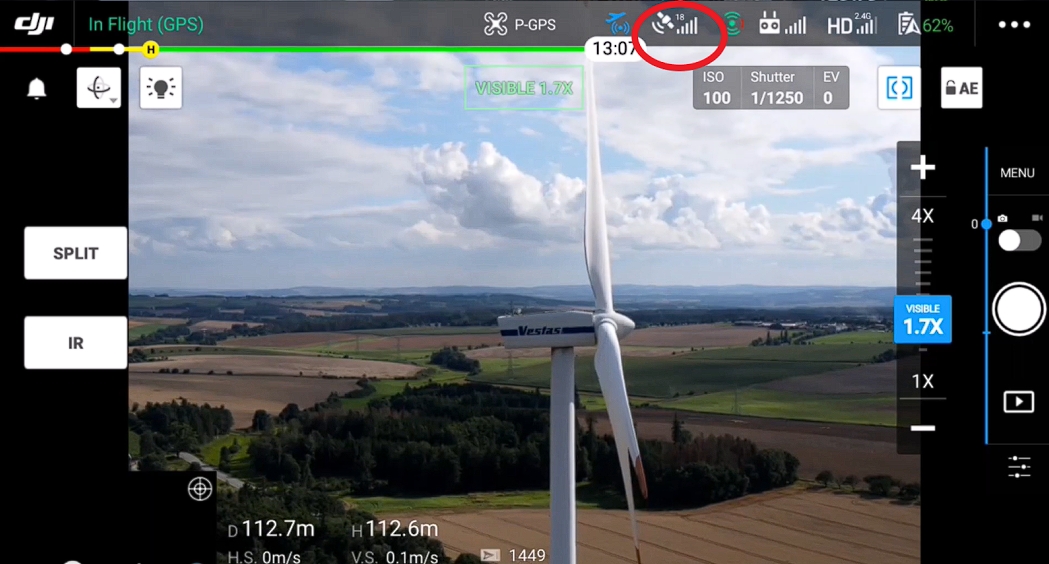
Nevzlétejte dokud nemáte alespoň 9 satelitů a uloženou pozici vzletu
GPS pozice je pro bezpečný provoz dronu nesmírně důležitá, důležité je tedy počkat, než dron najde alespoň 9 satelitů-což je absolutní minimum pro létání v naprosto bezpečném prostředí (mokré pole bez stromu), čím vyšší počet satelitů dron "vidí" tím lépe (doporučujeme alespoň 12-13 satelitů)-jeho pozice a let je stabilnější což se velmi hodí v průmyslových areálech a jiných stísněných prostorech. Velmi důležité je také uložení vzletového bodu, ten je nejpotřebnější ve chvíli, kdy dron ztratí signál, vybije se ovladač, nebo tablet, na kterém si zobrazujete obraz z dronu. Pokud dojde k jednomu ze scénářů výše, bude se dron vracet na pozici vzletu - pokud ji nemá uloženou, tak dron počká na místě kde signál ztratil a přistane tam. Horší situace ovšem nastane, pokud se bod návratu uložil někdy v průběhu letu-může se stát, že tento bod bude nad rybníkem, stromem apod. Proto doporučujeme pár minut počkat na vyhledání dostatečného počtu satelitů a vzletový bod vždy správně uložit-ovladač na to sám upozorní při vzletu.
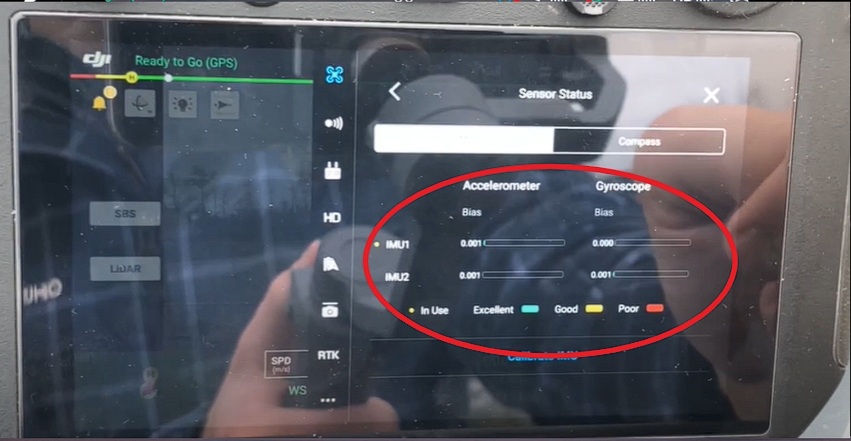
Před letem si kontrolujte zkalibrování kompasu a IMU jednotky
Kalibrace kompasu a IMU jednotky je také velmi důležitá, díky GPSce dron zná svou pozici, ale díky kompasu zná své natočení v dané pozici - pokud tedy počkáte na dostatečný počet satelitů a správně si uložíte pozici vzletu, ale budete vzlétat s rozkalibrovaným kompasem dojde k tomu, že dron sice bude znát svou pozici i pozici vzletu, ale nebude vědět jak se má natočit aby doletěl zpět. IMU jednotka zase měří naklonění dronu a jeho zrychlení ve všech směrech - navíc do ní DJI implementovalo barometr, díky kterému dron určuje svou výšku. Správná kalibrace IMU je tedy důležitá pro bezchybné chování dronu v letu a co nejpřesnější držení letové výšky. Aktuální stav nakalibrování kompasu a IMU jednotky zjistíte v menu v první záložce - po sjetí níže se objeví záložka "sensor status" a po rozkliknutí se zobrazí stav jednotlivých IMU a kompasů. Dle posuvníku a jeho barvy pak dron napovídá kdy kalibrovat - my doporučujeme ve chvíli, kdy posuvník zežloutne. Naopak nedoporučujeme dron zapínat a kalibrovat v blízkosti ocelových objektů (i aut, pozor také na cesty z armovaných betonových panelů) a už vůbec nedoporučujeme přímo z auta vzlétat.
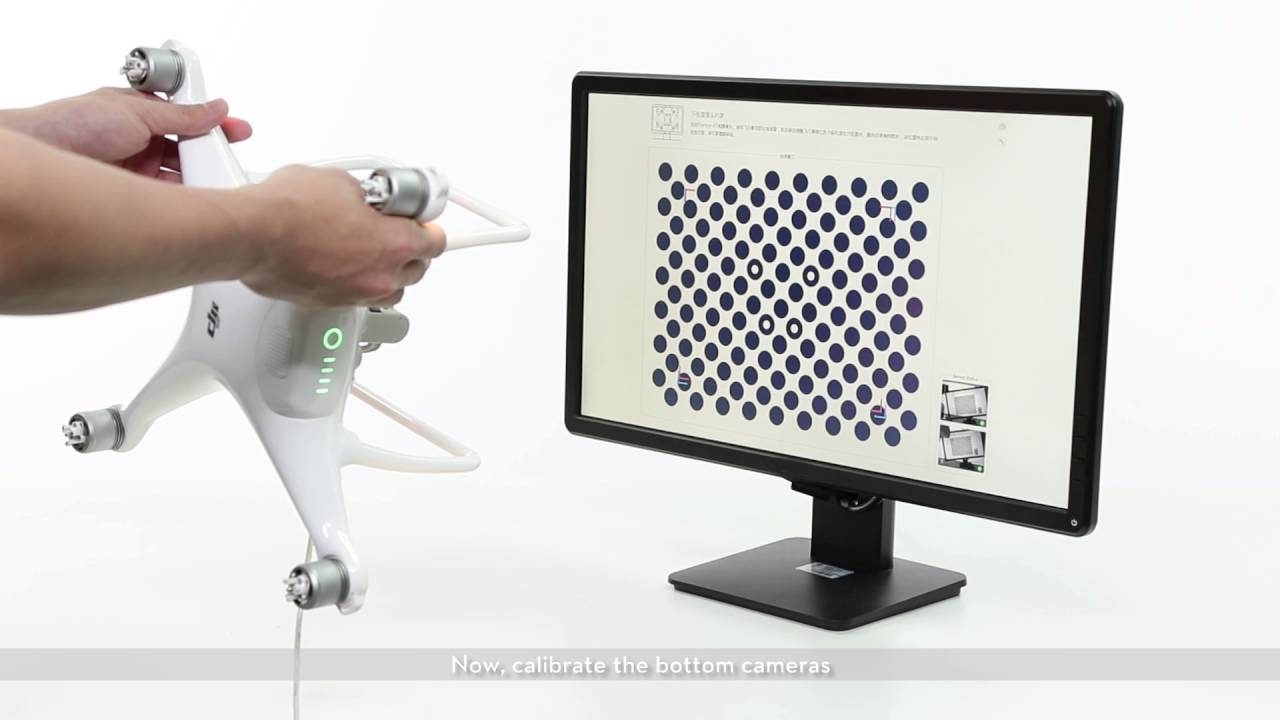
Rozkalibrovaná protinárazová čidla mohou být komplikace
Protinárazová čidla jsou skvělá věc zvlášť, pokud dron umí vyhodnocovat překážky ve všech směrech letu. Jejich činnost zvyšuje bezpečnost provozu a rozkalibrování není časté, ovšem pokud k němu dojde, je nutné kalibraci provést na notebooku nebo počítači. Pro snímání dat pro 3D model pískovny nemusí být tato čidla zas tak důležitá, ale pro celý den strávený v průmyslovém areálu s velkým množstvím ocelových konstrukcí se protinárazová čidla velmi hodí, proto doporučujeme přibalit s sebou vždy notebook s nainstalovaným DJI Assistant 2 (Enterprise series) K protinárazovým čidlům máme ještě poznámku - občas se stane, že dron vyhodnotí před sebou překážku v situacích, kdy letí přímo proti zapadajícímu slunci, nejedná se o projev rozkalibrovaných čidel, jde o vlastnost systému a nejde nijak odstranit - na obhajobu je dobré zmínit, že k tomu dochází jen velmi zřídka.
Rychlost větru a jak ji zjistit?
Rychlost větru je velmi důležitá hodnota, díky které se rozhodujeme, zda s dronem vůbec vzlétnout a zda-li půjde měření či snímání ještě provést. Velmi důležitá je rychlost větru při měření dronem s termovizí (např. DJI Mavic 2 Enterprise Advanced) kde nám jde o ochlazení měřeného objektu větrem, nebo při snímání dronem pro fotogrammetrii DJI P4 RTK kdy se může snímaný objekt ve větru hýbat, což nám může ztížit či znemožnit složení mapy či modelu. Pro tyto účely používáme kapesní anemometr rychlost větru určíme dle činnosti kterou s dronem vykonáváme a také dle odolnosti dronu větru.